Sustav upravljanja pomoću četiri kotača, 4WS, povećava okretnost pri nižim i dinamičku stabilnost pri višim brzinama
Upravljanje pomoću četiri kotača, u specijalnim i vojnim vozilima, koristi se gotovo sto godina. Prvi automobil na tržištu s takvom opcijom (uz doplatu) bija je Honda Prelude iz 1987.
Tada je po prvi put upotrebljena kratica 4WS (4 Wheel Steering – upravljanje pomoću 4 kotača), a zakretanje stražnjih kotača omogućavalo je povećanje okretnosti i stabilnosti.
No, prva generacija tog sustava nije pokazala osobitu učinkovitost, a i stigla je prije vremena.
Zbog toga je izostao tršišni uspjeh, a sličnu su sudbinu imale takve inačice Mazde 626 (1988.) te Mitsubishija 3000 GT i BMW-a 850i (1992.). Ovom tehnologijom, koja se može smatrati vrhuncem razvoja podvozja, najviše se koristi Renault a naziva ga 4Control.
Uveo ga je 2009. u Laguni, a sama njime Megane R.S. pokazuje sportsku izvrsnost.
O upravljivosti najčešće razmišljamo kad automobil trebamo parkirati u uski prostor u blizini zida ili rubnika. Takvi su manevri najlakši vožnjom unatrag, što nam ukazuje da bi zakretanjem i stražnjih kotača upravljanje bilo lakše.
No, upravljanjem pomoću svih kotača povećava se i stabilnost, posebice kod zahtjevnih manevara.Obični automobili upravljaju zakretanjem samo prednjih kotača, a kako ne bi došlo do bočnog proklizavanja (smicanja o asfalt) niti jedne gume, osi vrtnje svih kotača trebaju se sjeći u jednoj točki.

Zbog toga se prednji unutrašnji kotač mora zakrenuti za veći kut od vanjskog, što se postiže mehanizmom upravljačkog trapeza. Udaljenost te točke od središnjice automobila je polumjer zakretanja vozila oko vertikalne osi.
Kod polagane vožnje i kod stalne zakrenutosti upravljača on odgovara polumjeru okretanja vozila (u tehničkim se podacima navodi dvostruka vrijednost – krug okretanja). U vožnji kroz zavoje taj polumjer se mijenja i izravno utječe na centrifugalnu (inercijsku) silu. Što je polumjer veći, centrifugalna je sila manja (auto je stabilniji) i obrnuto.
Dakle, za upravljivost je korisno smanjiti polumjer zakretanja, jer se time poboljšavaju manevarska svojstva, a za stabilnost je korisno suprotno, jer se povećanjem polumjera zakretanja smanjuje centrifugalna sila. Naizgled nastaje nerjeąiva zagonetka, a rješenje nudi sustav 4WS.
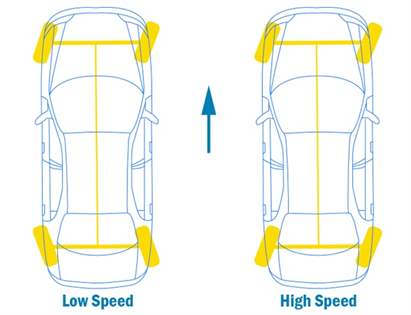
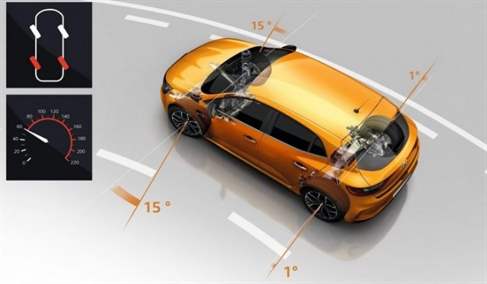
• pri malim brzinama važna su manevarska svojstva i okretnost, što se povećava zakretanjem stražnjih kotača suprotno od prednjih i smanjenjem polumjera zakretanja. Time se, istodobno povećava centrifugalna sila i smanjuje stabilnost, no kako je brzina mala, to nije bitno. Granica je na 60 km/h
• pri velikim brzinama najvažnija je stabilnost, a okretnost nije bitna (brzi su zavoji u pravilu blagi). Tada se zakretanjem stražnjih kotača u smjeru prednjih povećava polumjer zakretanja i proporcionalno smanjuje centrifugalna sila. Na centrifugalnu silu utječe i brzina, i to kvadratno. Ako se u zavoju, primjerice, brzina poveća sa 100 na 110 km/h, centrifugalna sila se povećava za 21 posto.
To se može kompenzirati povećanjem polumjera zakretanja za 21 posto. Mnogi vozači to postižu (svjesno ili nesvjesno) sječenjem zavoja, iako ih malo zna da je bit u povećanju polumjera zakretanja i smanjenju centrifugalne sile. Uz navedene teoretske postavke, sve je drugo mehanika i elektronika i u osnovi jednostavno.
Glavčina kotača je na nosaču s tri zgloba – dva su fiksna, s elastičnom vezom, a treći je povezan s aktivnom poprečnom motkom, koja pomicanjem zakreće kotač u jednom ili drugom smjeru.
Lijeva i desna pokretna motka spojene su na srediąnji elektromotorni aktuator – dvodijelna spona, s vijčanim mehanizmom i koračnim elektromotorom. U slučaju zakretanja suprotno od prednjih, stražnji se kotači zakreću do 3,5 stupnja te se krug okretanja automobila smanjuje sa 11,05 m (klasično upravljanje) na 10,3. Kod većih se brzina stražnji kotači zakreću u smjeru prednjih.
No, taj je postupak zahtjevniji i osjetljiviji, jer i mali kut zakretanja može izazvati velike promjene u stabilnosti. Zbog toga je najveći kut zakretanja stražnjih kotača, u smjeru prednjih, 2 stupnja, a podeąava se na temelju kuta zakretanja upravljača, brzine vožnje, bočnog ubrzanja i brzine vrtnje automobila oko vertikalne osi.
Sve to mjere senzori, a upravljačka elektronika u svakom trenutku proračunava najpovoljniji kut zakretanja stražnjih kotača.








Dinamika vozila (1): Što se događa u tri glavne osi (x, y, z)?
Dinamike vozila (2): Otpor kotrljanja kotača: kako nastaje, o čemu ovisi, na što utječe?
Dinamika vozila (3): ASR, ASC+T, Traction Control…
Dinamika vozila (4): Krug trenja (elipsa), temelj prianjanja, voznih svojstava i stabilnosti
Dinamika vozila (5): Upravljački trapez, što je to, čemu služi?
Dinamika vozila (6): Upravljačke značajke, podupravljivost, preupravljivost, neutralnost
…
Potpisnik ovih redaka je 1997., na Fakultetu strojarstva i brodogradnje u Zagrebu, doktorirao iz područja dinamike vozila (Vehicle Dynamics), s naglaskom na utjecaj sustava upravljanja na dinamičku stabilnost automobila. Istraživanja iz tog područja nastavio je postdoktorskim programom, sljedeće tri godine, u Fordovom razvojnom centru John Andrews u Kölnu i testnom poligonu Lommel Proving Ground u Belgiji. To je zaključio koautorstvima u stručnim knjigama Subjektive Fahreindrücke sichtbar machen I i Subjektive Fahreindrücke sichtbar machen II.




