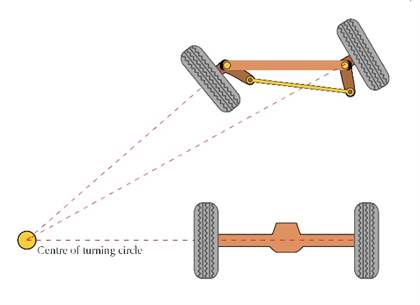
Upravljački trapez omogućava vožnju zavojem bez klizanja kotača, a to osigurava 4-zglobni polužni mehanizam, koji podešava različite kutove zakretanja prednjih kotača, veći na unutrašnjoj strani zavoja…
Da bi se automobil mogao kretati krivocrtno, dakle po zakrivljenoj putanji, ugrađen je upravljački mehanizam, koji prednje kotače (kod klasičnog upravljačkog sustava, a postoji i sustav 4WS, upravljanja pomoću četiri kotača, o čemu ćemo pisati posebno) zakreće u smjeru zavoja.
Pritom se automobil počinje kretati po zakrivljeni krivulji, koja je u svakom trenutku dio određene, zamišljene kružnice, u čijem je središtu pol rotacije vozila. U realnim uvjetima mijenja se položaj središta i polumjer rotacije, no važno je da da se, u svakom trenutku osi rotacije svih kotača sijeku u istoj točki, upravo u središtu rotacije automobila oko vertikalne osi.

Time se ostvaruju uvjeti da se svi kotači kotrljaju vlastitim putanjama, bez uzdužnog i bočnog klizanja. A da bi to tako bilo, nužno je da se kotač s unutrašnje strane zavoja zakreće za veći kut od kotača s vanjske strane.
Prvi takav mehanizam, primitivan i neprecizan , gdje je svaki kotač bio na zasebnoj njihajućom osi, napravio je 1761. dr. Erasmus Darwin (1731. – 1802.), a unaprijeđenog patentirao ga je 1816. Georg Lankensperger (1779. – 1847.) iz Münchena.
Njegov zastupnik Rudolph Ackermann (1764. – 1834), Nijemac koji je živio u Londonu, izum je patentirao i uveo na englesko tržište kočija.
Njegovom se spretnošću, taj princip upravljanja vozila, tako da se osi rotacije svih kotača sijeku u jednoj točki, središtu zakretanja vozila, dakle da vozilo skreće i upravlja bez bočnog klizanja kotača, zove Ackermannov princip.
No, za izvedbu 4-zglobnog upravljačkog trapeza, s dva okretna zgloba, kakvu danas poznajemo, zaslužna su i dva velika konstruktora, Francuz Amédée Bollée i Nijemac Carl Benz, odnosno njihovi patenti iz 1876. i 1891.
Ovim principom se definira razlika između zakretanja i okretanja. Automobil se u zakreće oko središta zakretanja u kojem se sijeku osi okretanja (rotacije svih kotača). Vožnjom kroz zavoje automobil se zakreće, uz pomoć upravljačkog trapeza, a kotači i radilica motora se okreću.
Zato je zakretni moment pogrešan izraz, točno je okretni moment.
Dinamika vozila (1): Što se događa u tri glavne osi (x, y, z)?
Dinamike vozila (2): Otpor kotrljanja kotača: kako nastaje, o čemu ovisi, na što utječe?
Dinamika vozila (3): ASR, ASC+T, Traction Control…
Dinamika vozila (4): Krug trenja (elipsa), temelj prianjanja, voznih svojstava i stabilnosti
…
Potpisnik ovih redaka je 1997., na Fakultetu strojarstva i brodogradnje u Zagrebu, doktorirao iz područja dinamike vozila (Vehicle Dynamics), s naglaskom na utjecaj sustava upravljanja na dinamičku stabilnost automobila. Istraživanja iz tog područja nastavio je postdoktorskim programom, sljedeće tri godine, u Fordovom razvojnom centru John Andrews u Kölnu i testnom poligonu Lommel Proving Ground u Belgiji. To je zaključio koautorstvima u stručnim knjigama Subjektive Fahreindrücke sichtbar machen I i Subjektive Fahreindrücke sichtbar machen II.




