Pri vožnji u zavoju, uslijed djelovanja bočnih sila, nužno dolazi do deformacijskog bočnog proklizavanja guma, središte rotacije vozila oko vertikalne osi mijenja položaj te najčešće i polumjer rotacije, a time i centrifugalna sila…
Tekst: Željko Marušić
Kako bi se automobil mogao kretati krivocrtno, dakle po zakrivljenoj putanji, ugrađen je upravljački mehanizam, koji prednje kotače (kod klasičnog upravljačkog sustava) zakreće u smjeru zavoja. Pritom se automobil počinje kretati po zakrivljeni krivulji, koja je u svakom trenutku dio određene, zamišljene kružnice, u čijem je središtu pol rotacije vozila. U slučaju skretanja bez bočnog klizanja kotača (idealan, u stvarnosti rijedak slučaj) imamo slučaj Ackermannovog upravljanja.
Pri vožnji u zavoju, uslijed djelovanja bočnih sila nužno dolazi do deformacijskog bočnog proklizavanja guma, središte rotacije vozila oko vertikalne osi mijenja položaj te najčešće i polumjer rotacije, a time i centrifugalna sila.Ovisno o iznosima deformacijskih bočnih skretanja prednjih i stražnjih kotača, odnosno o njihovom omjeru imamo tri upravljačke značajke automobila:

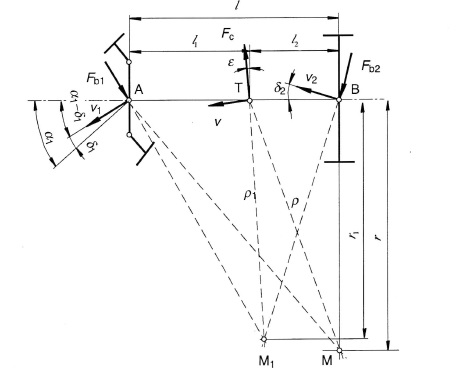
PODUPRAVLJIVOST (engl. understeer) nastaje u slučaju kad je deformacijsko bočno skretanje prednjih kotača veće nego stražnjih te se pol rotacije vozila oko vertikalne osi pomiče iz M u M1, Polumjer zakretanja vozila postaje veći od polumjera zavoja i automobil nastoji ići prema vanjskom dijelu zavoja. Automobil se zadržava u putanji dodatnim zakretanjem volana. Ovaj je slučaj povoljan za dinamičku stabilnost, jer se povećavanjem polumjera zakretanja vozila proporcionalno smanjuju centrifugalna sila i bočne sile na kotačima. Međutim, tada vozilo, iako dinamički stabilizirano, može izletjeti na suprotnu traku i sudariti se, primjerice, sa šleperom. U ovom je slučaju rizik izlijetanja s ceste najveći (primjerice u provaliju), jer automobil izlijeće tangencijalno i najmanjom površinom udara u zaštitnu barijeru.

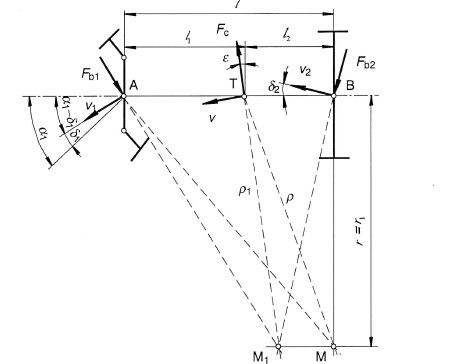
PREUPRAVLJIVOST, mnogi pogrešno kažu ‘predupravljivost’, (engl. oversteer) je slučaj slučaju kad je deformacijsko bočno skretanje stražnjih kotača veće nego prednjih te se pol rotacije vozila oko vertikalne osi pomiče iz M u M1, Polumjer zakretanja vozila postaje manji od polumjera zavoja i automobil nastoji ići prema unutarnjem dijelu zavoja. Automobil se zadržava u putanji oduzimanjem volana. Ovaj je slučaj iznimno ne povoljan za dinamičku stabilnost, jer se smanjenjem polumjera zakretanja vozila proporcionalno povećavaju centrifugalna sila i bočne sile na kotačima, te automobil lako na cesti može napraviti ‘piruetu’.
NEUTRALNA UPRAVLJIVOST ili neutralnost je najpovoljniji slučaj. Nastaje u slučaju kad je deformacijsko bočno skretanje prednjih kotača jednako kao kod stražnjih. Tada je trenutni polumjer zakretanja vozila jednak polumjeru zavoja, to vozilo zadržava željeni kurs, bez potrebnih dodatnih intervencija volanom.
Za dinamičku su stabilnost prvenstveno odgovorni stražnji kotači. No to ne znači da je vožnja time uvijek sigurnija. Naime, uslijed zanošenja prednjih kotača automobil ‘dinamički stabilno’ može sletjeti u provaliju ili se zabiti u automobil iz suprotne trake.
Potpisnik ovih redaka je 1997., na Fakultetu strojarstva i brodogradnje u Zagrebu, doktorirao iz područja dinamike vozila (Vehicle Dynamics), s naglaskom na utjecaj sustava upravljanja na dinamičku stabilnost automobila. Istraživanja iz tog područja nastavio je postdoktorskim programom, sljedeće tri godine, u Fordovom razvojnom centru John Andrews u Kölnu i testnom poligonu Lommel Proving Ground u Belgiji. To je zaključio koautorstvima u stručnim knjigama Subjektive Fahreindrücke sichtbar machen I i Subjektive Fahreindrücke sichtbar machen II.
Dinamika vozila (1): Što se događa u tri glavne osi (x, y, z)?
Dinamike vozila (2): Otpor kotrljanja kotača: kako nastaje, o čemu ovisi, na što utječe?
Dinamika vozila (3): ASR, ASC+T, Traction Control…
Dinamika vozila (4): Krug trenja (elipsa), temelj prianjanja, voznih svojstava i stabilnosti
Dinamika vozila (5): Upravljački trapez, što je to, čemu služi?
















